

 联系我们
联系我们

以KUKA为例的话,分协作机器人iiwa和传统机器人KR两个大系列。
当前主流的协作机器人都采用“模块化”思想的关节设计,采用直驱电机+谐波减速器的方式,每个关节的内部结构基本一致,只是大小不太一样,例如iiwa的每个轴基本都是下图这样:
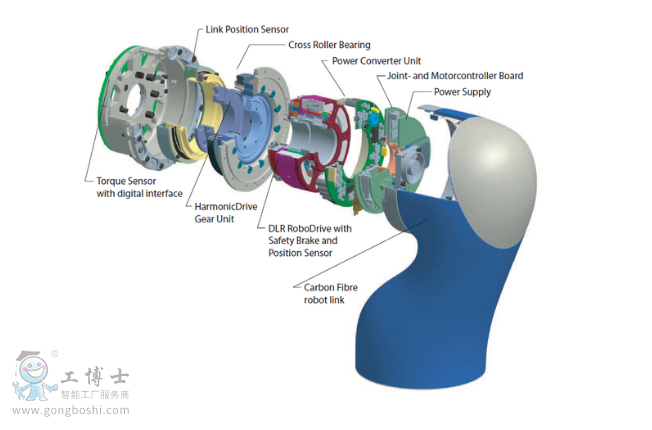
每一个关节中都包含了电机、伺服驱动、谐波减速器、电机端编码器、关节端位置传感器和力矩传感器,电机和减速器采用直连。
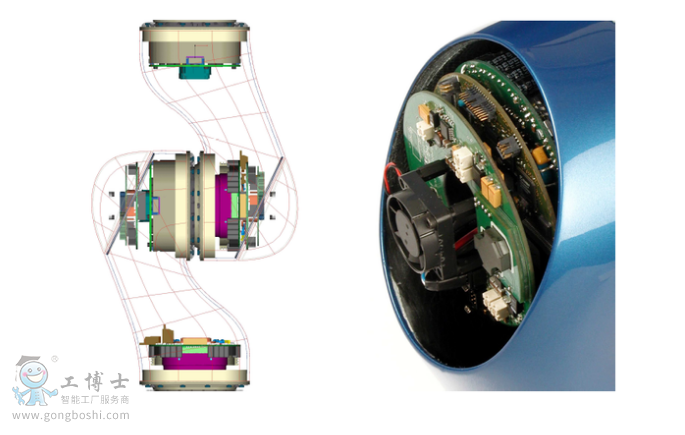
整个关节在机器人内部的布局如下:
联系热线:13818950030 联系人:关明 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 库卡工业机器人经销商
